FOC-based Brushless DC Motor (BLDC) Control
Date:
Abstract
FOC is a highly efficient method for controlling BLDCMs, ensuring smooth operation by precisely controlling the magnetic field’s direction and magnitude. It reduces noise, enhances efficiency, and enables seamless transitions between forward and reverse rotations at various speeds. Integrated with PID controllers, FOC supports triple-loop control (speed, position, current), offering significant advantages over speed control alone.
Field Oriented Control
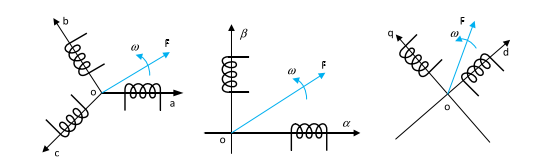
Coordinate Transformation
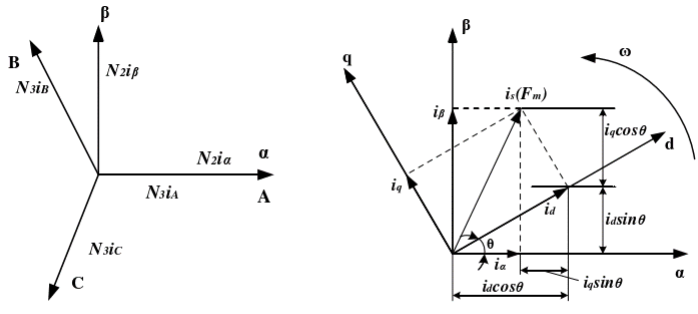
Clarke’s Transformation
\[\begin{bmatrix} i_{\alpha}\\ i_{\beta}\\ i_0 \end{bmatrix} = \sqrt{\frac{2}{3}} \begin{bmatrix} 1 &-\frac{1}{2} &-\frac{1}{2}\\ 0 &\frac{\sqrt{3}}{2} &-\frac{\sqrt{3}}{2}\\ \frac{1}{\sqrt{2}} &\frac{1}{\sqrt{2}} &\frac{1}{\sqrt{2}} \end{bmatrix} \begin{bmatrix} i_A\\ i_B\\ i_C \end{bmatrix}\]Park’s Transformation
\[\begin{bmatrix} i_d\\ i_q \end{bmatrix} = \begin{bmatrix} cos\theta &sin\theta\\ -sin\theta &cos\theta \end{bmatrix}\]
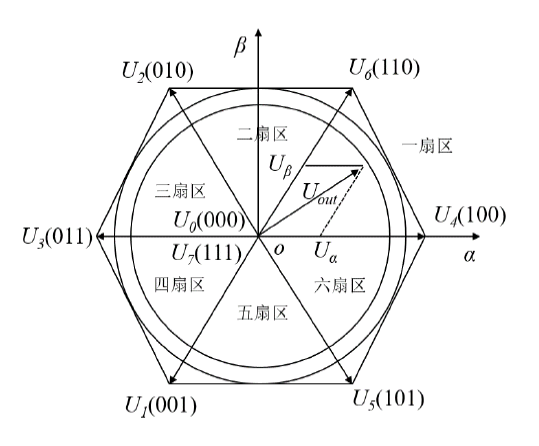
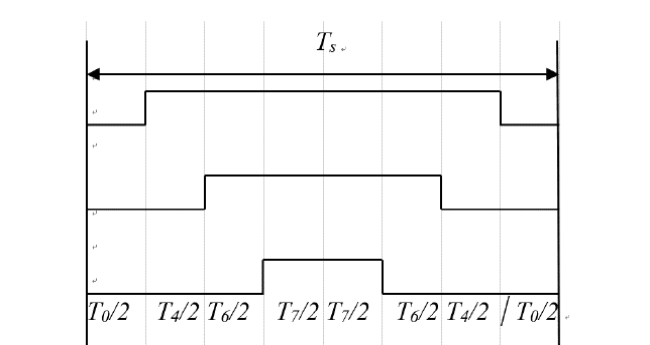
Space Vector Pulse Width Modulation (SVPWM)
SVPWM is an advanced method for controlling inverters in power electronics. It efficiently generates nearly sinusoidal AC output voltages using the DC bus voltage.
Conclusion
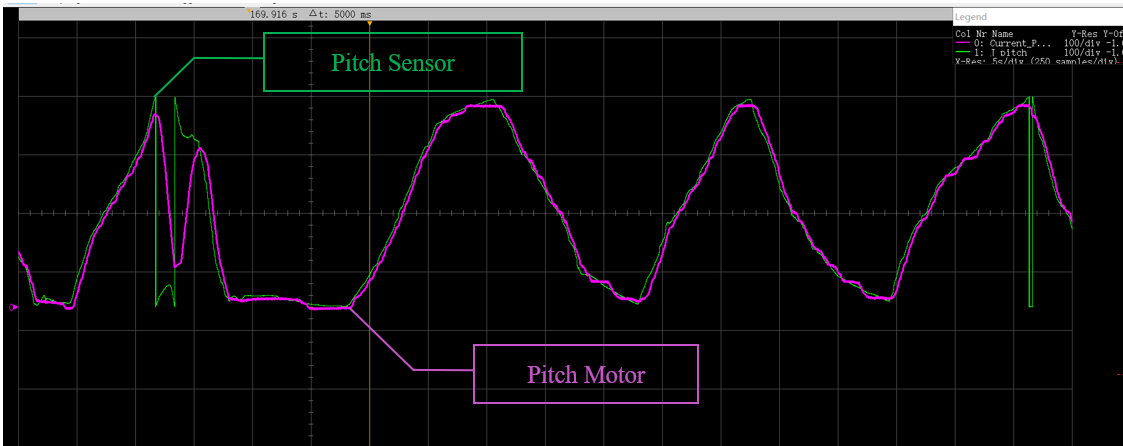
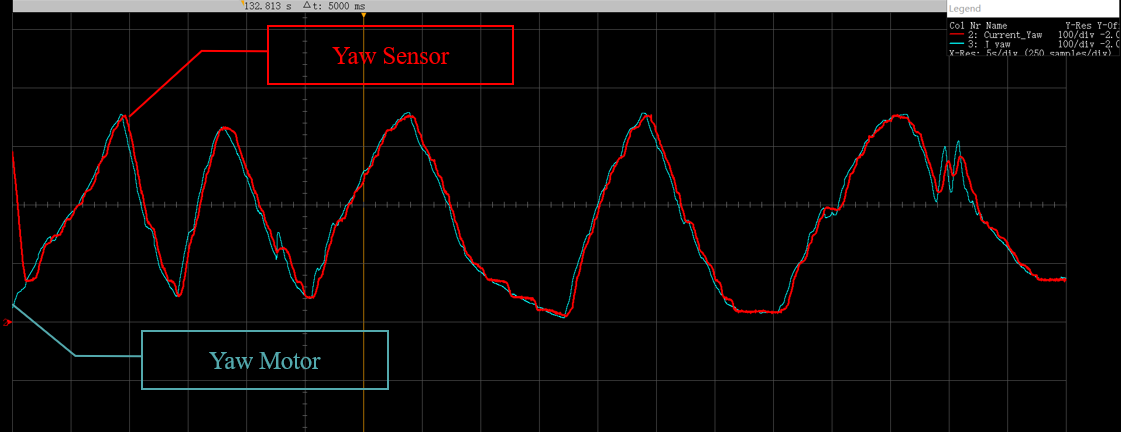
The experiment of the above system involves using the stabilizing gimbal to compensate and track the attitude angles read from the MPU6050 in reverse, aiming to effectively control the motor encoder and stabilize the angle difference in real-time tracking and compensation.